Одним из важнейших направлений совершенствования и развития спутниковой радионавигации является совместное использование сигналов ГЛОНАСС и GPS. Основные цели этого процесса - повышение точности и надежности (доступности, непрерывности обслуживания и целостности) навигационных определений.
Наиболее важными предпосылками, облегчающими совместное использование и интегрирование, служат:
Рассмотрим точностные аспекты совместного использования сигналов ГЛОНАСС и GPS (ГЛОНАСС + GPS). В табл. 1 приведены средние вероятности (Р) наблюдения заданного числа КА (>=4) полной группировки ГЛОНАСС и соответствующие геометрические факторы при определении плановых координат (НDOP), высоты (VDОР) и времени (ТDOР).
| Таблица 1. Характеристики наблюдаемости КА ГЛОНАСС и геометрические факторы | ||||||
| Число KA | 4 | 5 | 6 | 7 | 8 | 9 |
| P | 1 | 1 | 1 | 1 | 0.91 | 0.58 |
| HDOP | 1.41 | 1.26 | 1.15 | 1.03 | 0.95 | 0.89 |
| VDOP | 2 | 1.75 | 1.7 | 1.61 | 1.6 | 1.55 |
| TDOP | 1.13 | 1.03 | 1.03 | 0.95 | 0.93 | 0.91 |
Считая вероятностные характеристики наблюдаемости КА GPS аналогичными приведенным для ГЛОНАСС, из анализа данных первой строки табл. 1 следует, что средняя вероятность нахождения в поле видимости не менее 16 КА ГЛОНАСС+GPS составляет примерно 0,99, а 18 и более КА - 0,84.
Таким образом, представляется целесообразным проследить дальнейшую тенденцию улучшения геометрических факторов, наметившуюся в расчетах для табл.1. Это тем более имеет смысл вследствие определившегося стремления к увеличению числа каналов аппаратуры потребителей СРНС и дифференциальных станций (до 16-20) и приема сигналов всех КА, находящихся в поле зрения БА и ДС.
В табл. 2 приведены рассчитанные усредненные значения геометрических факторов для района г. Москвы, как функции числа используемых при навигационных определениях спутников.
| Таблица 2. Зависимость геометрических факторов от числа КА | |||
| Число KA | HDOP | VDOP | TDOP |
| 8 КА ГЛОНАСС | 1.03 | 1.34 | 0.8 |
| 10 КА ГЛОНАСС | 0.84 | 1.24 | 0.72 |
| Все КА ГЛОНАСС+GPS | 0.58 | 0.84 | - |
Из табл. 2 следует, что использование всех КА ГЛОНАСС и GPS в дифференциальном режиме или в случае отсутствия селективного доступа к GPS приводит к повышению точности определения координат и высоты примерно в 1,6 и 1,4 раза по отношению к варианту определений по 8 и 10 КА ГЛОНАСС соответственно.
В табл. 2 приведены также рассчитанные аналогичным образом усредненные по времени точности определения координат (среднеквадратическое радиальное отклонение; drms) и высоты (СКО) в номинальном и дифференциальном режимах с селективным доступом GPS (СД).
| Таблица 3. Точности определения координат и высоты с помощью СРНС ГЛОНАСС и GPS | ||
| Режим | Координаты; drms; м | Высота; СКО; м |
| Все КА ГЛОНАСС, н* | 9 | 13.5 |
| 16 КА ГЛОНАСС+GPS(СД);н | 8.5 | 12.6 |
| Все КА ГЛОНАСС+GPS(СД);н | 8.4 | 12.5 |
| Все КА ГЛОНАСС; д* | 1.8 | 2.6 |
| 16КАГЛОНАCC+GPS;д | 1.36 | 1.9 |
| Все КА ГЛОНАСС+GPS(СД);д | 1.24 | 1.82 |
* буквы "н" и "д" обозначают номинальный и дифференциальный режимы СРНС соответственно.
Из табл. 3 следует, что использование КА GPS в номинальном режиме с селективным доступом в дополнение к КА ГЛОНАСС приводит к повышению точности лишь на 5...10% по координатам и на 8% по высоте. Предполагалось, что точности (СКО) измерения псевдодальностей ГЛОНАСС и GPS в номинальном режиме равны 10 и 30 м соответственно.
В дифференциальном режиме точности (СКО) определения псевдодальностей предполагались равными 2 м для обеих СРНС. Как следует из табл. 3, в дифференциальном режиме привлечение измерений GPS приводит к повышению точности по координатам и высоте в 1,3...1,5 раза.
Необходимо заметить, что для потребителей, первоначально ориентированных на GPS, использование сигналов ГЛОНАСС дает практически троекратное повышение точности.
Вопросы повышения надежности навигационного обеспечения при совместном использовании КА ГЛОНАСС и GPS исследованы пока меньше. Представляется, что наиболее продвинутыми являются результаты обширного моделирования процесса навигационных определений.
В табл. 4 и 5 приведены оценки доступности функции RAIM (требуется иметь в поле видимости не менее 6 НКА) и максимальной продолжительности нерабочего состояния при использовании только КА СРЗ и GPS+ГЛОНАСС.
| Таблица 4. Доступность СРНС на различных этапах полета ВС, % | |||
| Группировка | Полет по маршруту | Аэродромная зона | Неточный заход на посадку |
| GPS | 98,58 | 96,53 | 67,26 |
| GPS+ГЛОНАСС (декабрь 1994 г.) | 100 | 99.99 | 98.87 |
| GРS+ГЛОНАСС | 100 | 100 | 100 |
| Таблица 5. Максимальная продолжительность нерабочего состояния, мин | |||
| Группировка | Полет по маршруту | Аэродромная зона | Неточный заход на посадку |
| GPS | 35 | 70 | 295 |
| GPS+ГЛОНАСС (декабрь 1994 г.) | 0 | 15 | 30 |
| GРS+ГЛОНАСС | 0 | 0 | 0 |
При моделировании предполагалось, что при выполнении функции контроля целостности (RAIM) используется базовый алгоритм, работающий с измерениями не менее, чем от 6 КА, и исключающий из решения некондиционный сигнал. Анализ доступности проводился по группировке GPS из 24 КА и группировке ГЛОНАСС также из 24 КА, а также по действующей группировке ГЛОНАСС.
Факт доступности устанавливался в том случае, если при нарушениях подавался сигнал тревоги с вероятностью не менее заданной в течение пролета указанного предельного участка при заданном максимально допустимом уровне вероятности ложной тревоги.
При моделировании использовались исходные данные, сведенные в табл. 6.
| Таблица 6. Условия определения доступности | |||
| Этап | Предельный участок, км | Максимально допустимая частота ложной тревоги, 1/ч | Минимальная вероятность обнаружения отказа |
| Полет по маршруту | 3,7 | 0.00003 | 0.999 |
| Аэродромная зона | 1.85 | 0.00003 | 0.999 |
| Неточный заход | 0.555 | 0.00003 | 0.999 |
Как следует из табл. 4,использование GPS совместно с ГЛОНАСС приводит к существенному повышению доступности особенно для неточного (некатегорированного) захода на посадку (с 67% до 100%). При этом также исключаются нерабочие состояния, максимальные длительности которых при использовании только GPS составляют от 35 до 295 мин.
Оценим возможные точностные характеристики навигационных определений потребителя, опирающегося на ГЛОНАСС, в случае существования орбитальной группировки системы в усеченном варианте, например, 12 НКА. При этом появляются "мертвые зоны", когда навигационные определения по ГЛОНАСС отсутствуют, а также ухудшается точность определения НП за счет ухудшения геометрии НКА ГЛОНАСС и использования более грубых измерений ПД и ПС системы GPS.
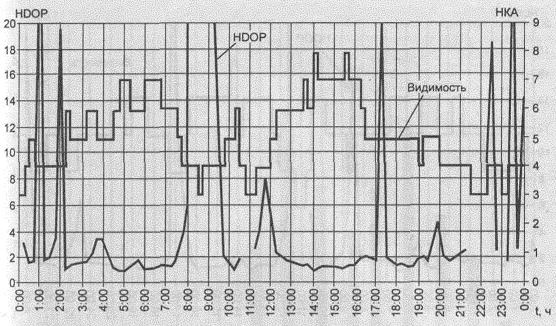
В качестве примера приведем результаты расчета с помощью программы МРWIN фирмы Маgellan геометрического фактора при определении координат ЛА (НDОР) и видимости НКА ГЛОНАСС (рис. 1-4) для Москвы на 1.8.99 г. При этом рис. 1 относится к группировке из 15 НКА, которая была в начале июня 1999 г., рис. 2,3 относятся к группировке из 12 НКА. Рис. 3 дает указанные характеристики для случая навигационных определений с известной высотой (режим 2Д), которая может, например, определяться с помощью СВС воздушного судна. Из рис. 1 следует, что неблагоприятные условия видимости и соответствующие величины НDОР имели место с 1 до 2 ч. 30 мин (время московское), с 8 до 10 часов, с 10ч. 30 мин. до 12 ч., с 17 ч. до 17ч. 30 мин. и с 21 ч. до 24 ч. Еще худшие условия складываются при 12 НКА (рис. 2). Несколько лучшие условия имеют место при определении координат в режиме 2Д (рис. 3), когда длительность неблагоприятных периодов сокращается в 2-3 раза (сравним рис. 2 и 3). Дополнительное использование GPS в условиях рис. 2 существенно улучшает обстановку; так в поле видимости постоянно находится от 8 до 16 НКА (рис. 4), а геометрический фактор (НDОР) в большинстве случаев оказывается меньше 1, Для сравнения можно использовать также данные наблюдений, проведенных с помощью приемника фирмы Ashtech GG-24 Лаборатории Линкольна МТИ (LL МIТ) 18.1.1999.
Видимость НКА ГЛОНАСС, GPS и совместно ГЛОНАСС/GPS характеризуется рис. 5.
Полученные при использовании только сигналов 11 НКА ГЛОНАСС погрешности навигационных определений сведены в табл. 7.
| Таблица 7. Ошибки определения НП по 11 НКА ГЛОНАСС | |||
| Доля времени, % | Ошибка определения плановых координат, м | Ошибка определения высоты, м | Ошибка определения горизонтальной скорости, м/с |
| 50 | 12 | 30.6 | 0.03 |
| 95 | 45 | 121.7 | 1.03 |
| 99 | 77.4 | 173.30 | 3.32 |
В ходе проведенных наблюдений из рис. 5 определено, что полные навигационные определения координат, высоты и составляющих скорости могут быть получены в 57% времени суток. При этом в 37% времени геометрический фактор определения геодезических координат оказывается более двух. Именно для этой ситуации справедливы данные табл. 7. В то же время плановые координаты при видимости 3-х и более НКА могут быть получены в 91% времени суток.
Рис. 1. Геометричекий фактор и видимость НКА ГЛОНАСС (15 НКА)
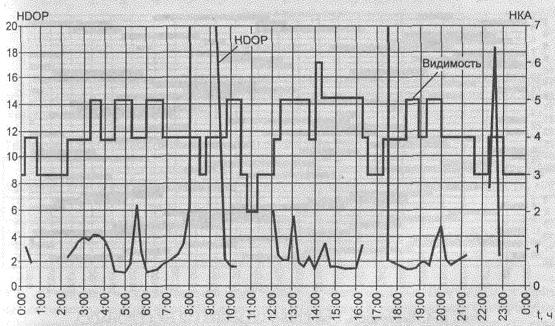
Рис. 2. Геометричекий фактор и видимость НКА ГЛОНАСС (12 НКА)
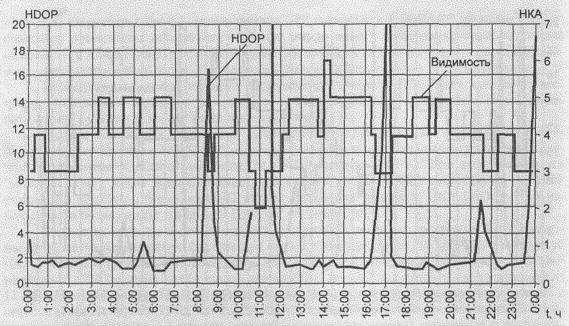
Рис. 3. Геометричекий фактор и видимость НКА ГЛОНАСС (12 НКА), 2Д
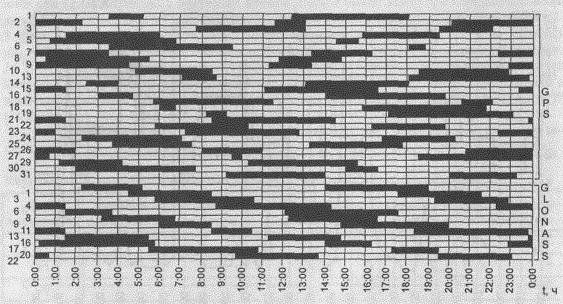
Рис. 4. Видимость НКА ГЛОНАСС и GPS (12 НКА ГЛОНАСС)
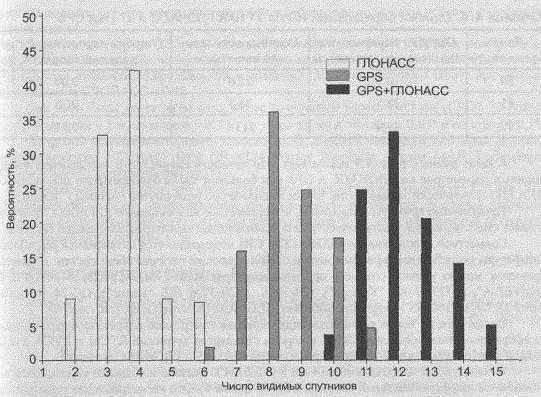
Рис. 5. Видимость спутников
В табл. 8 приведены характеристики ошибок определения навигационных параметров (НП) при использовании приемником GG-24 только сигналов с С/А-кодом всех находящихся в поле видимости НКА GPS.
| Таблица 8. Ошибки определения НП по 27 НКА GРS | |||
| Доля времени, % | Ошибка определения плановых координат, м | Ошибка определения высоты, м | Ошибка определения горизонтальной скорости, м/с |
| 50 | 19.1 | 28 | 0.17 |
| 95 | 43.8 | 79.2 | 0.42 |
| 99 | 60.6 | 107.5 | 0.58 |
В наихудшем случае точность использования в полете лишь 4-х НКА GPS будет определяться точностью работы по открытым сигналам с С/А-кодом с геометрическим фактором более 1-2 и составит по координатам 35 (СКО) и 50 м (drms). Из табл. 8 также следует, что даже в идеальных условиях точность (СКО) определения скорости по GPS находится на уровне 0,2 м/с, что существенно хуже точности определения скорости по системе ГЛОНАСС (лучше 0,1 м/с).
В табл. 9 приведены характеристики ошибок совместного использования ГЛОНАСС и GPS для тех же условий, при которых получены данные табл. 7, 8.
| Таблица 9. Ошибки определения НП по 11 НКА ГЛОНАСС и 27 НКА GPS | |||
| Доля времени, % | Ошибка определения плановых координат, м | Ошибка определения высоты, м | Ошибка определения горизонтальной скорости, м/с |
| 50 | 10.6 | 27 | 0.04 |
| 95 | 28.7 | 74.7 | 0.2 |
| 99 | 43.4 | 113.1 | 0.31 |
Анализ данных табл. 9 показывает, что точность совместного определения навигационных параметров по ГЛОНАСС и GPS при большом числе одновременно используемых НКА (38) практически эквивалентна точности полностью развернутой системы ГЛОНАСС.
Приведенные примеры показывают, что совместное использование ГЛОНАСС и GPS позволяет существенно улучшить точностные и надежностные характеристики каждой системы.
Совместное использование ГЛОНАСС и GPS поддерживается интенсивной разработкой аппаратуры потребителей, принимающей и обрабатывающей сигналы обеих систем. В качестве примеров можно указать создание приемоиндикаторов АСН-21М, АСН-22, А-744 (РИРВ), "ИНТЕР-А", А-737 (МКБ "Компас"), СН-3001,..., СН-3706 (КБ "Навис"), GG-24 (Маgellan-Ashtech), СNSS-300 (3S Navigation), Мillenium GLONASS (NovAtel) и др.
Осуществлена также разработка ряда образцов контрольно-корректирующих станций дифференциальных подсистем СРНС и версии стандартов комиссий RТСМ и RТСА для передачи корректирующих сообщений применительно к GPS и ГЛОНАСС.
Совместное применение обеих систем оказывается возможным благодаря близости используемых систем координат: ПЗ-90 - в ГЛОНАСС и WGS-84 - в GPS, а также благодаря имеющимся соотношениям перехода от одной системы координат к другой.
В то же время эти соотношения нуждаются в уточнениях, что является одной из задач дальнейших совместных исследований специалистов России и США. Эти исследования продолжаются, в том числе в ходе международного эксперимента IGEX-98
Исследование вопросов совместного использования ГЛОНАСС и GPS продолжается. В заключение отметим, что интегрирование и совместное использование ГЛОНАСС и GPS обеспечивают также резервирование навигационного обеспечения на случай непредвиденных форс-мажорных обстоятельств, связанных, например, с террористической деятельностью, земными катаклизмами и др.


